Occupancy as Set of Points
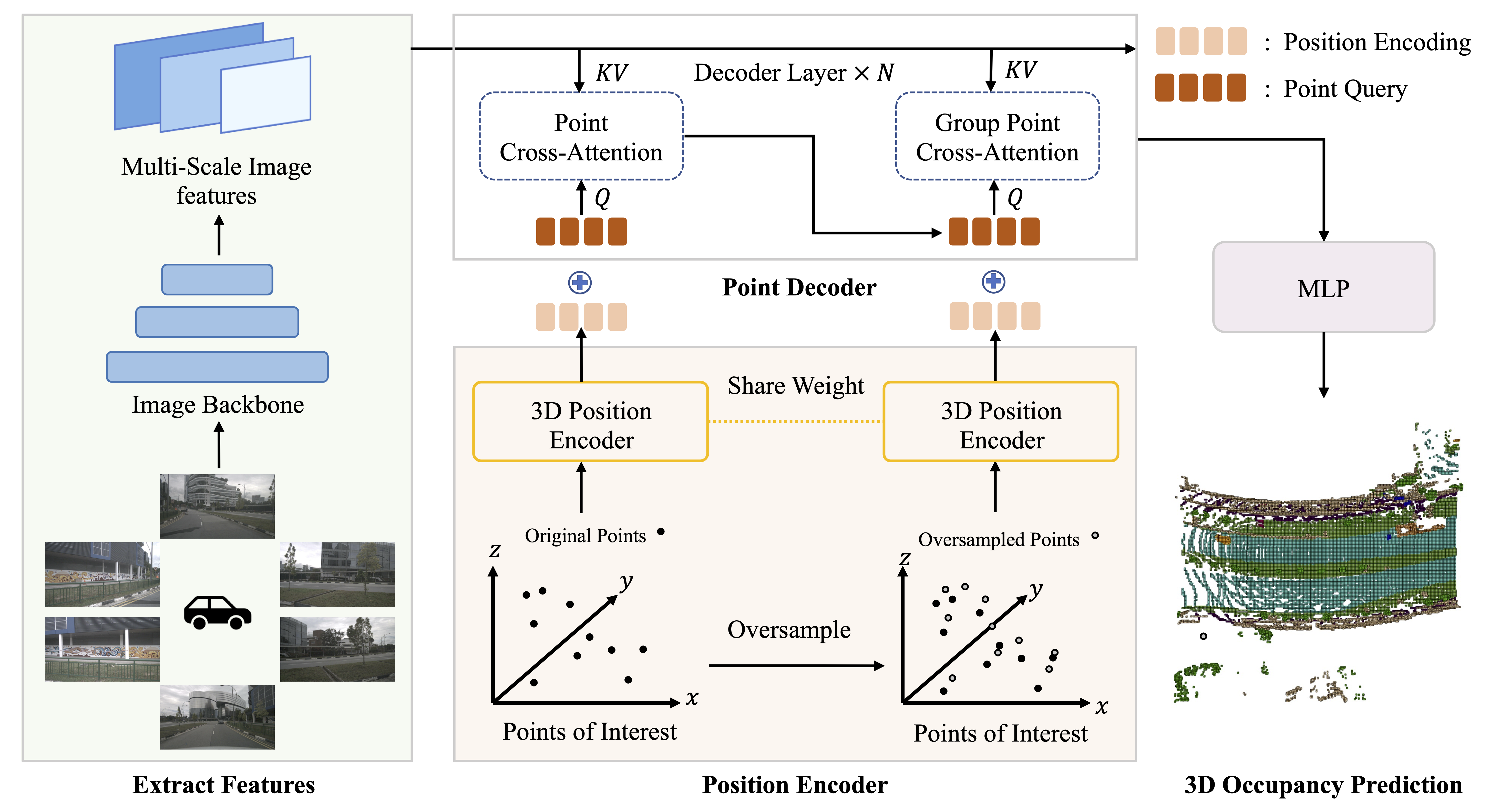
In this paper, we explore a novel point representation for 3D occupancy prediction from multi-view images, which is named Occupancy as Set of Points. Existing camera-based methods tend to exploit dense volume-based representation to predict the occupancy of the whole scene, making it hard to focus on the special areas or areas out of the perception range. In comparison, we present the Points of Interest (PoIs) to represent the scene and propose OSP, a novel framework for point-based 3D occupancy prediction. Owing to the inherent flexibility of the point-based representation, OSP achieves strong performance compared with existing methods and excels in terms of training and inference adaptability. It extends beyond traditional perception boundaries and can be seamlessly integrated with volume-based methods to significantly enhance their effectiveness. Experiments on the Occ3D nuScenes occupancy benchmark show that OSP has strong performance and flexibility. Code and models are available at \url{https://github.com/hustvl/osp}.
PDF Abstract
 nuScenes
nuScenes
 Occ3D
Occ3D
